

|
4 паллетизатора, которые распределяют продукцию с одной линии транспорт 
|
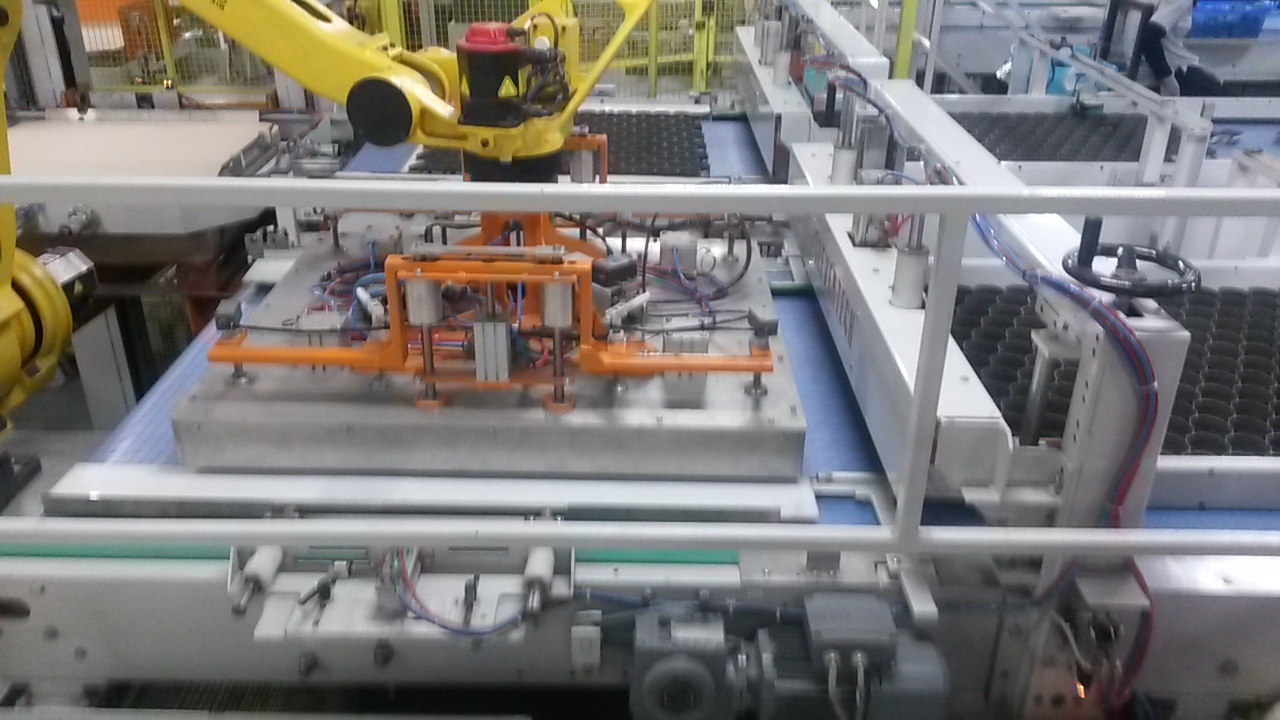
Клиент и место Henkel Пермь Россия Год 2021 Описание работы: Этот завод управляет сортировкой и укладкой на поддоны картонных коробок, поступающих с производственных линий, с использованием одного длинного транспорта. Все продукты смешиваются вдоль конвейерной линии и отбираются на входе в зону укладки на поддоны с помощью считывателя штрих-кода. Затем на транспортном средстве INTRALOX они направляются в соответствующую зону предварительного формования, где робот переносит часть сформированного слоя на поддон. Затем сформированные поддоны отправляются на упаковочную машину и на склад. Общая скорость производства может достигать 80 упаковок в минуту В производственной зоне упаковки снимаются с линий и вставляются в транспортную зону без какого-либо приоритета и/или последовательности, управление пунктом назначения продукта происходит только в начале площади паллетирования. Расстояние от производственной зоны и зоны укладки на поддоны составляет примерно 300 метров, управление транспортом на одной линии позволило значительно сэкономить на установке.
|
|
Изображение одного из роботов, управляющих 2 формировани зонами 
|

|
|
Использование элементов управления камерой с роботами 
|
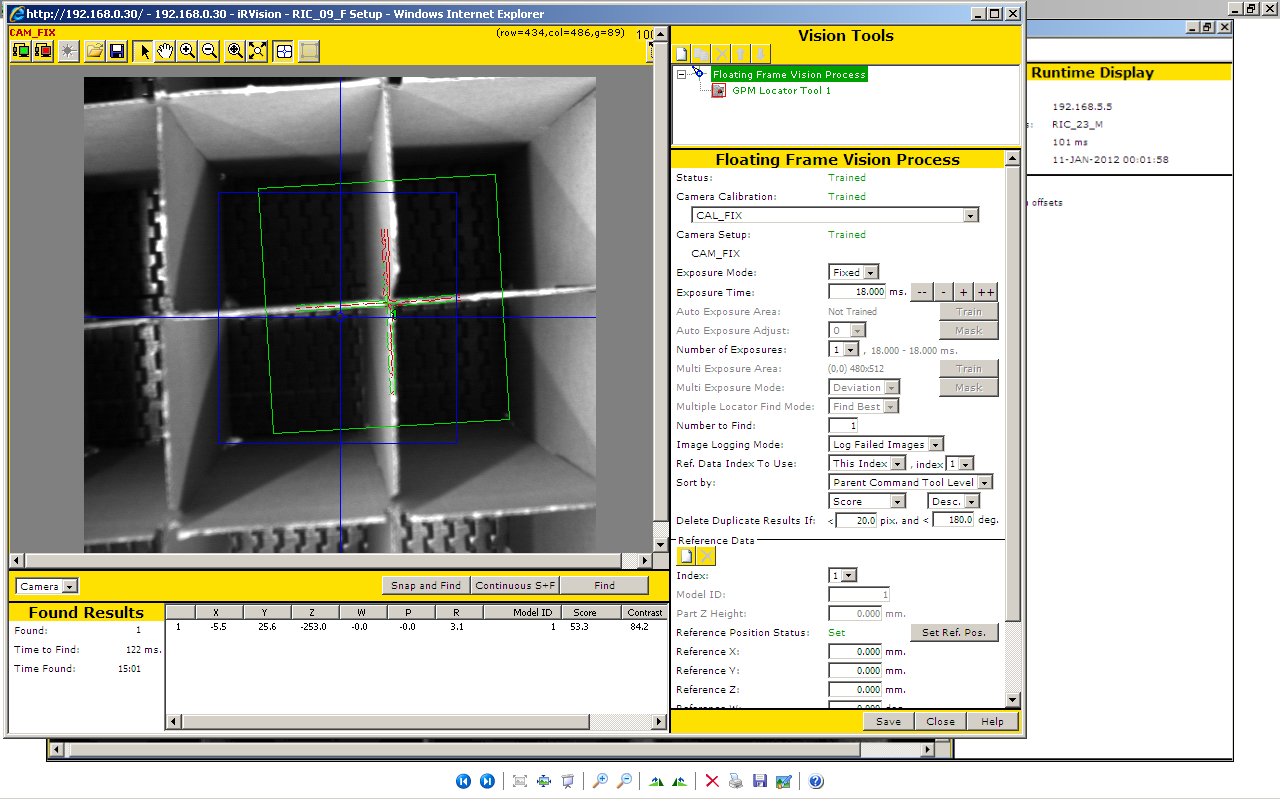
Клиент и место Diageo ltd Sheldhall England Год 2012 Описание работы: Начиная со старого депаллетайзера OCME, 4-осный робот Fanuc был установлен для извлечения картонных сепараторов между бутылками. В старом депалетизаторе использовалась механическая система, которая не позволяла правильно центрировать и извлекать сепаратор. С роботом и системой камер можно было идеально центрировать захваты, которые извлекают картон. |
|
Пример того, как камера распознает картон 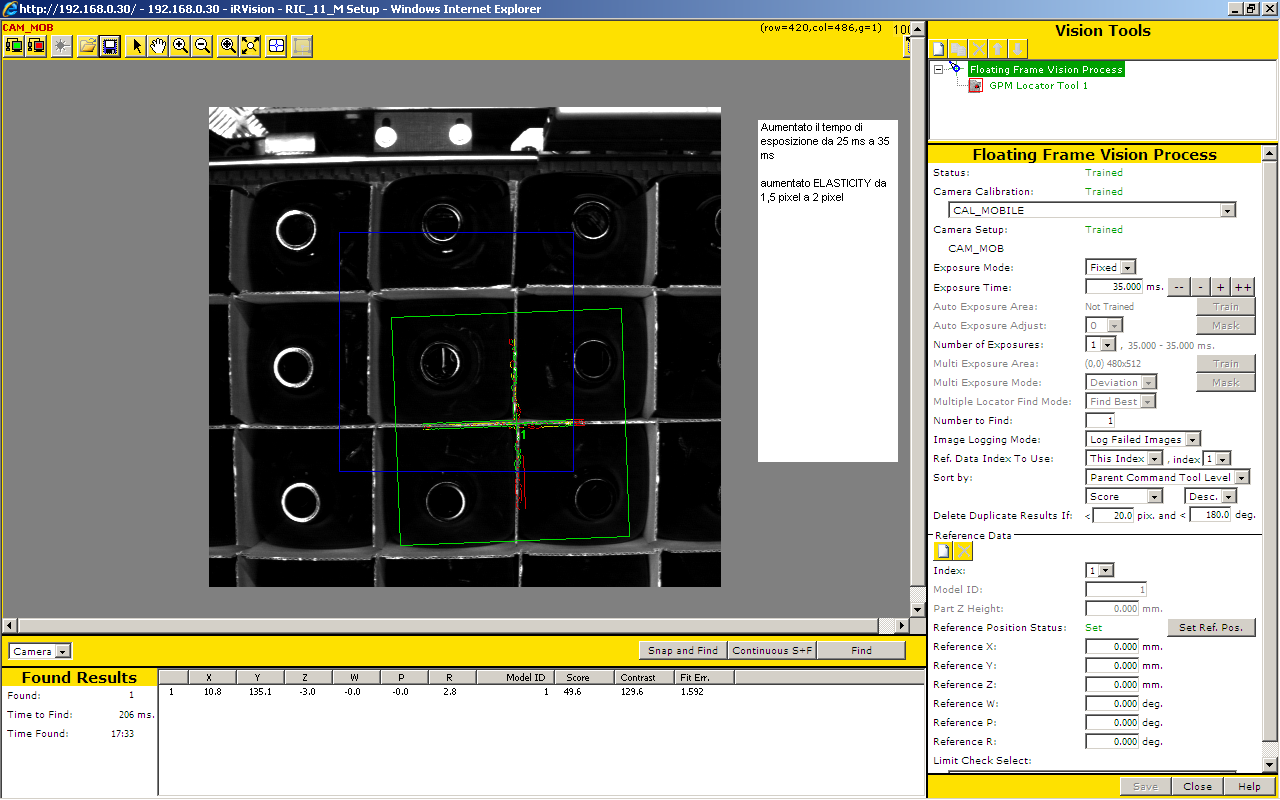
|
|
|
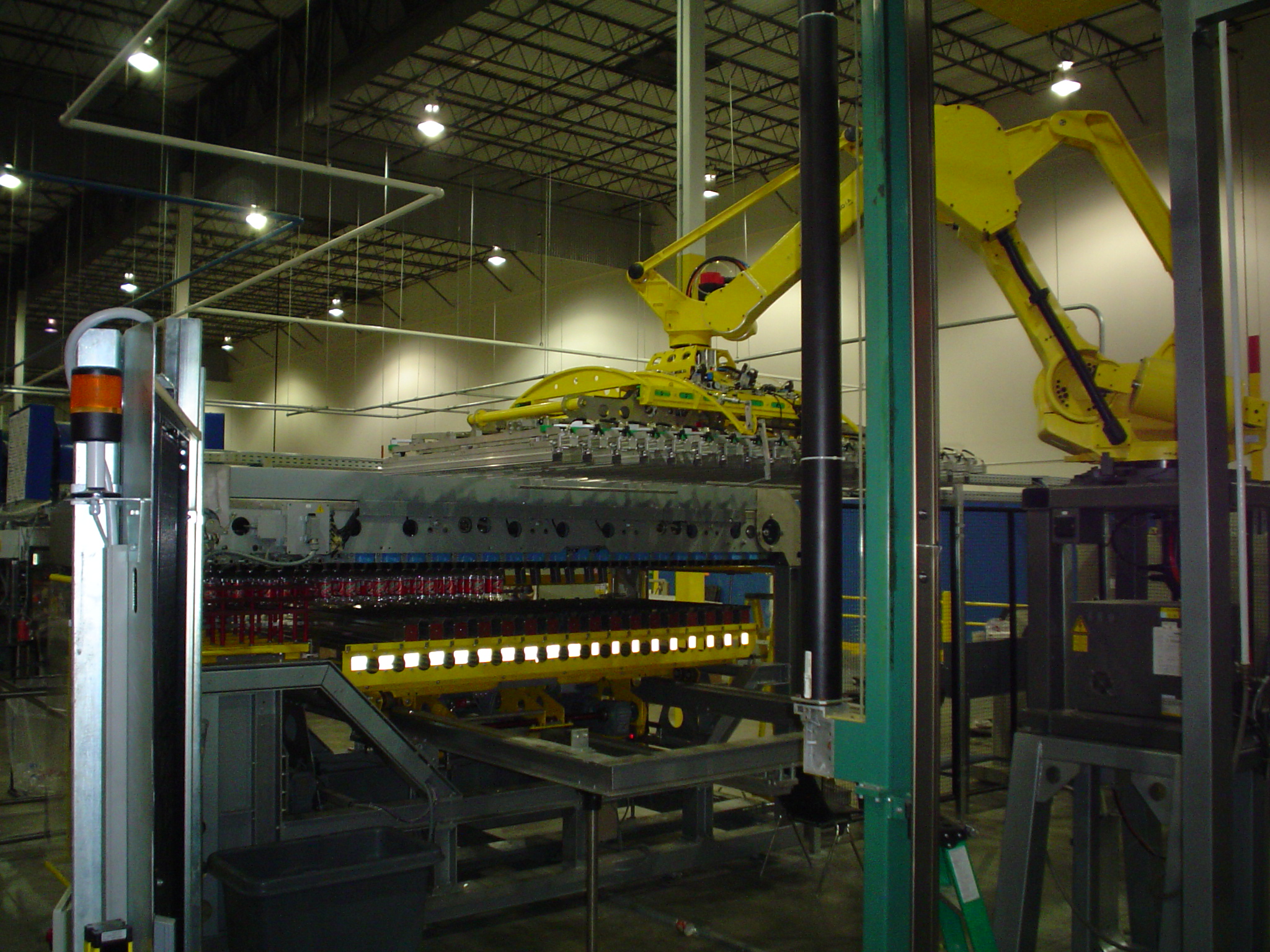
Использование роботов для простого паллетирования 
|
Клиент и место APC Samut sakon Таиланд 2017 г. Описание работы: Паллетайзер с роботом Fanuc с полным захватом слоя. Сначала Робот сосет картон с помощью системы присосок, потом когда слой банки формируется, поднимает его и осаждает. На этом заводе было установлено 8 паллетайзеров, по 6 из которых с магнитная голова. и 2-х с вакуумная голова. |
|

|
|
|
Использование роботов для пустого ПЭТ паллетирования 
|
Клиент и место Constar Orlando e Dallas США. 2004 г. Описание работы: Использование роботов Fanuc для паллетирования пустых ПЭТ-бутылок. Основная сложность такого типа паллетирования заключается в чрезвычайной легкости бутылок. Чтобы они не упали, их необходимо крепко удерживать до окончательного отложения на поддоне. Рассматриваемая машина работает в 3 этапа: первый образует слой внутри закрытого транспорта с удаленными бутылками. Второй, робот с полностью открытой головой, забирает бутылки из транспорта. Третий робот закрывает головку до размера слоя и откладывает бутылки. Было установлено 4 таких паллетайзера.. |
|
|

|
|
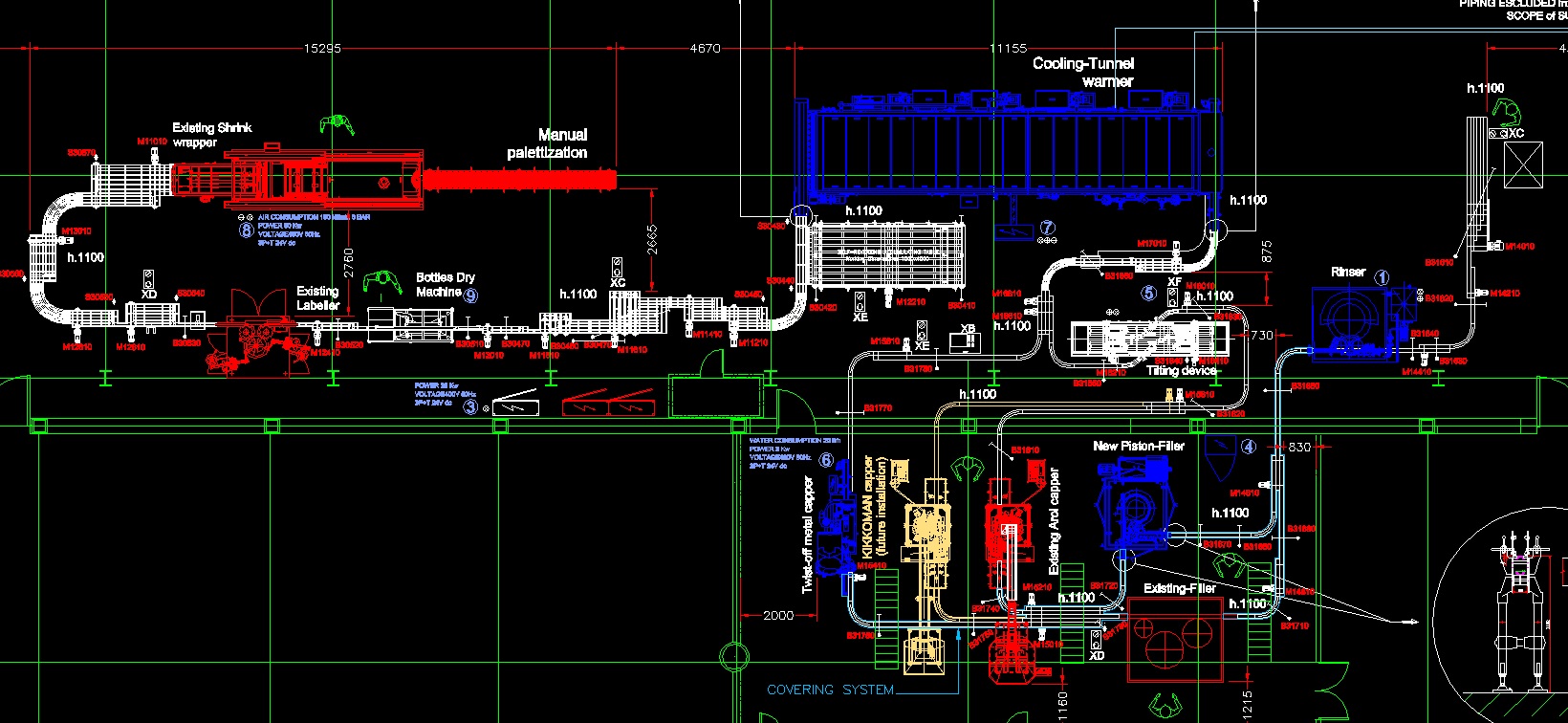
Модернизация линии розлива соевого соуса 
|
Клиент и место ООО Состра Бужарово M.О 2010 г. Описание работы: Модернизация линии по производству соевого соуса путем первоначального добавления депаллетизатора, изменения компоновки и установки дополнительных инверторов. Линия управлялась двумя ПЛК с отдельными панелями оператора и отдельными рецептами производства. Все было унифицировано под управлением ПЛК с использованием второй электрической панели в качестве дистанционного. Все производственные параметры и рецепты были унифицированы. После этой модификации линия стала намного более эффективной и управляемой. |
|
|
|
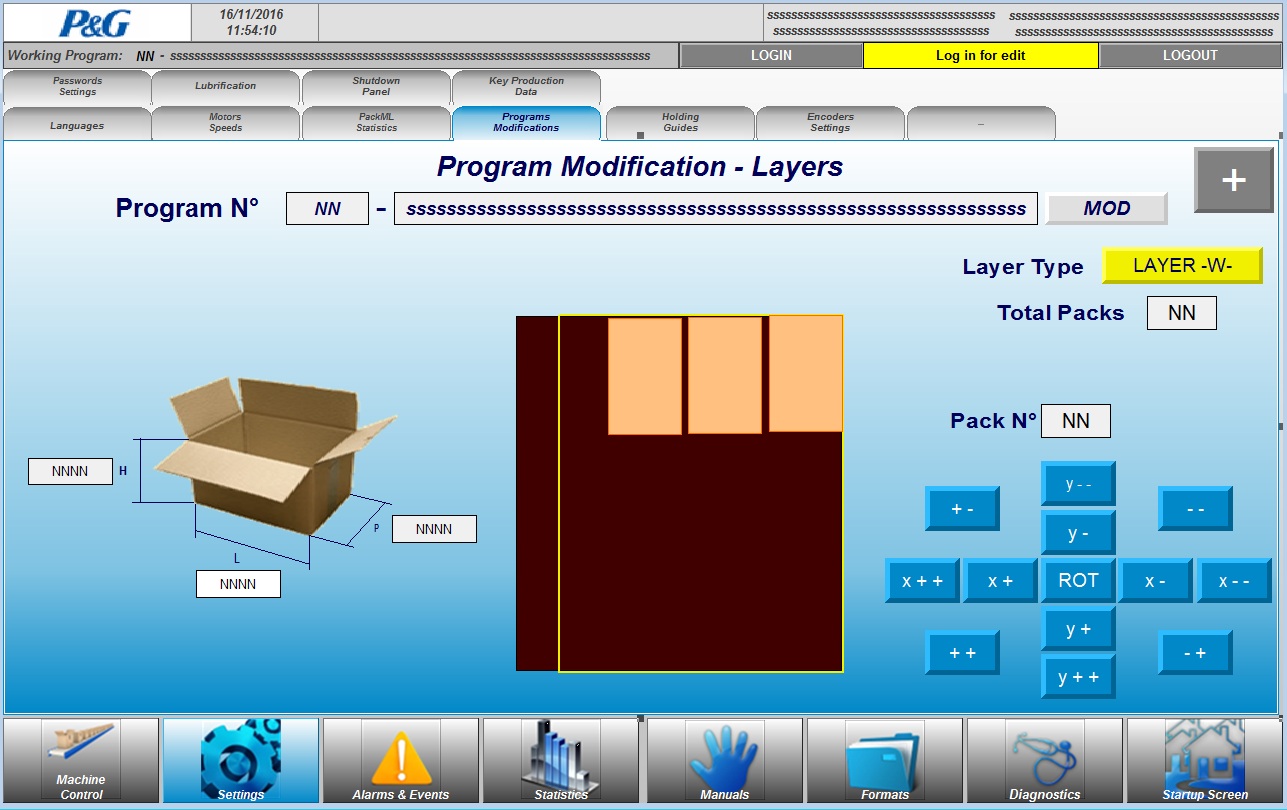
Depallettizzatore / Pallettizzatore per riformazione palette incomplete 
|
Клиент и место Prokter & Gable Krailsheim Германия 2017 г. Описание работы: Внедрение программного обеспечения и управление и ввод в эксплуатацию. Машина позволяет создавать полные поддоны, начиная с незавершенных, с помощью 4-осевого робота ABB. Робот изначально берет первый неполный слой и кладет его на первый стол, где он будет сфотографированное. После точного анализа количества и местоположения упаковок они подбираются роботом один за другим, а на втором столе преобразуется полный слой. Поддон с оставшимися слоями перемещается в зону укладки на поддоны, и после завершения перекомпонованный слой осаждается. Все управляется полностью автоматически. Единственная операция, которую необходимо выполнить, - это считывание штрих-кода продукта на поддонах, которые вводит водитель вилочного погрузчика. Эта установка поддерживает до 700 различных форматов картонных коробок. Настройка распознавания фотографий выполняется просто путем вставки нового продукта в предварительно определенное положение, а схемы укладки на поддоны нарисованы на панели оператора.
|
|

|
|